


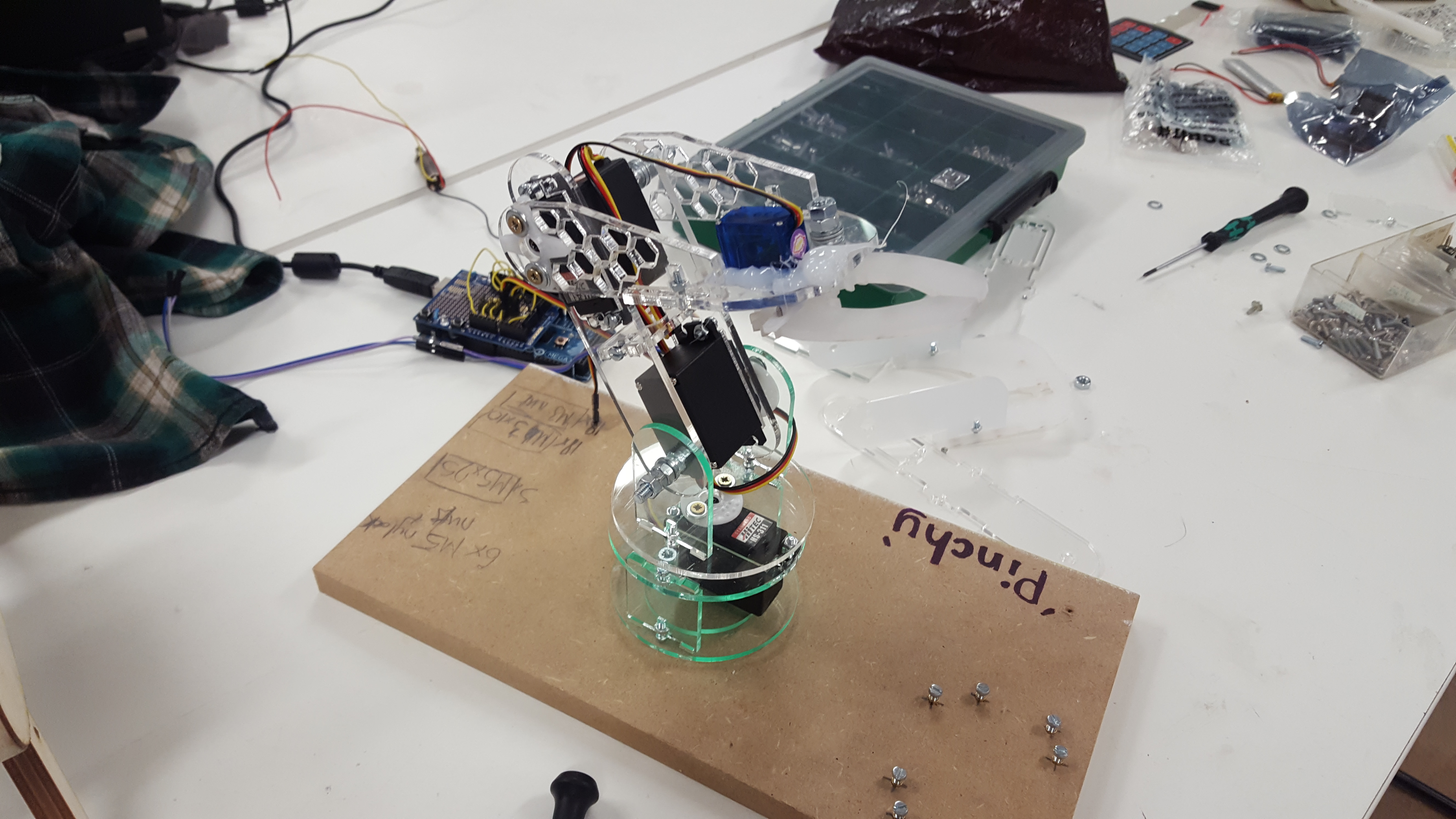
During my time as a volunteer at Cardiff School of Art & Design’s FabLab, I worked as part of a team with Paul Waterfield and Kit Kaye. We developed an Arduino controlled Robotic Arm to be used in a potential workshop.
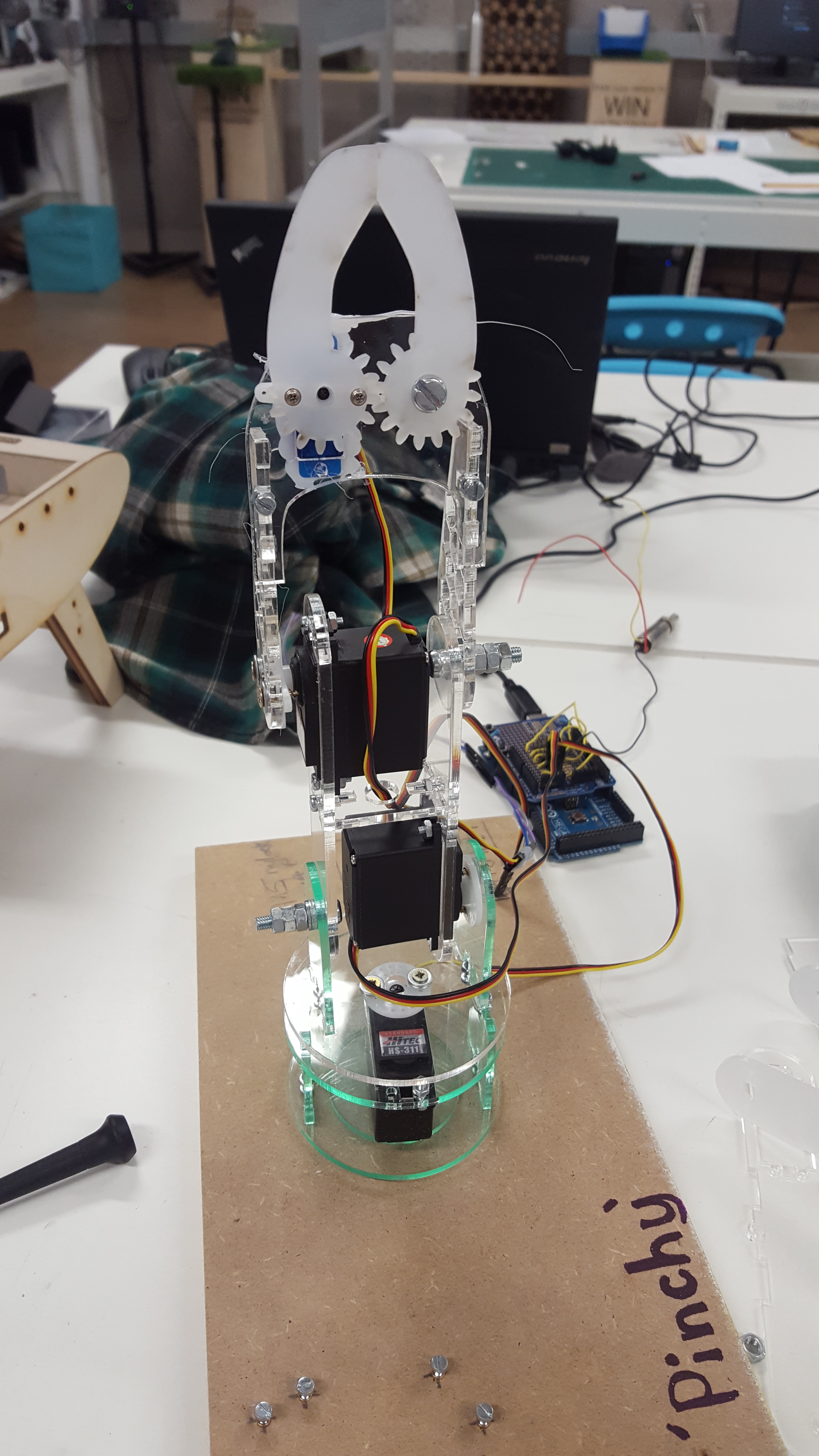
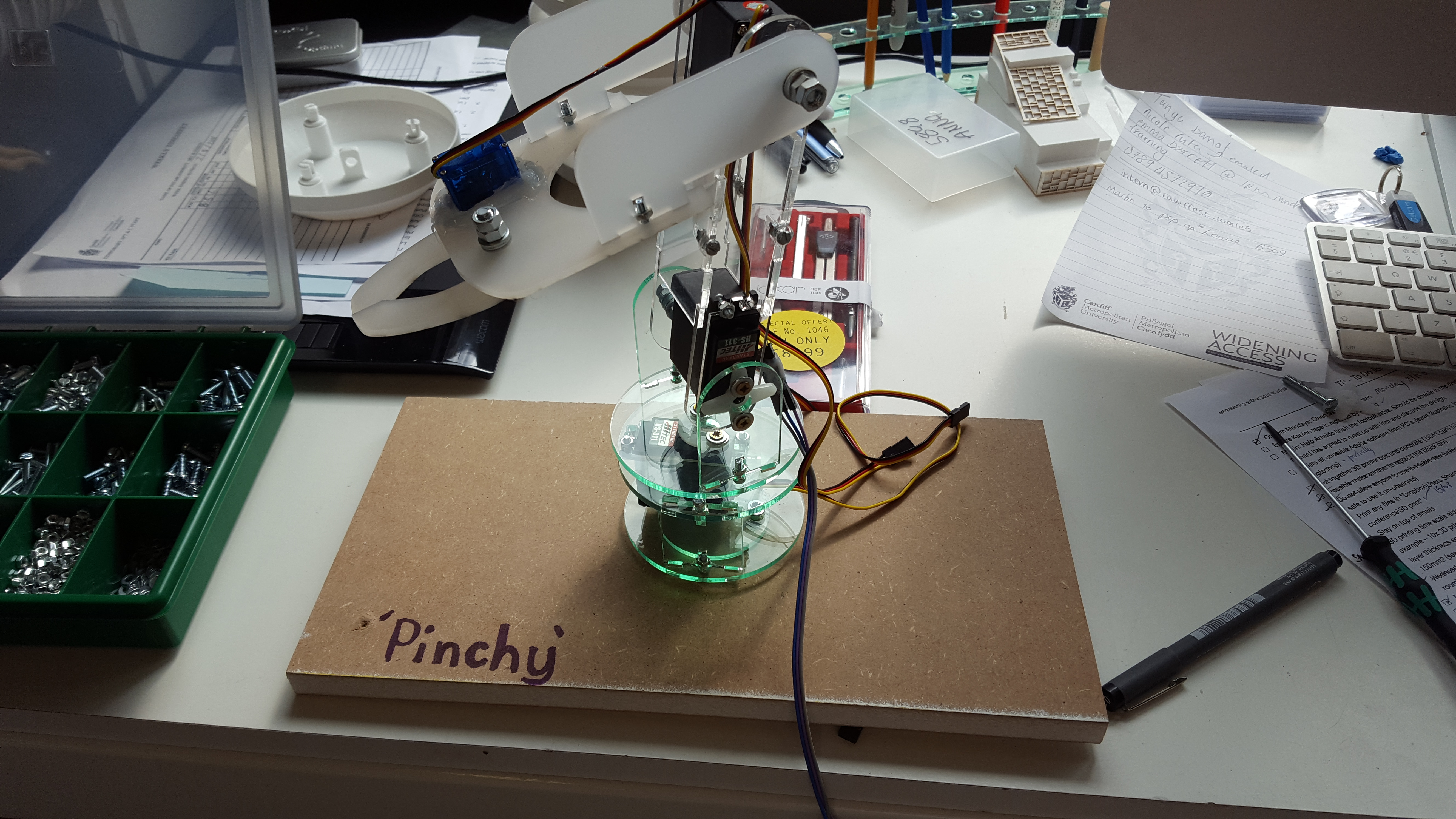
We designed the Robot Arm to be fully laser cut from as small amount of Acrylic as possible to save on wastage and costs, with the final development using only half a standard 600x400mm sheet of acrylic.
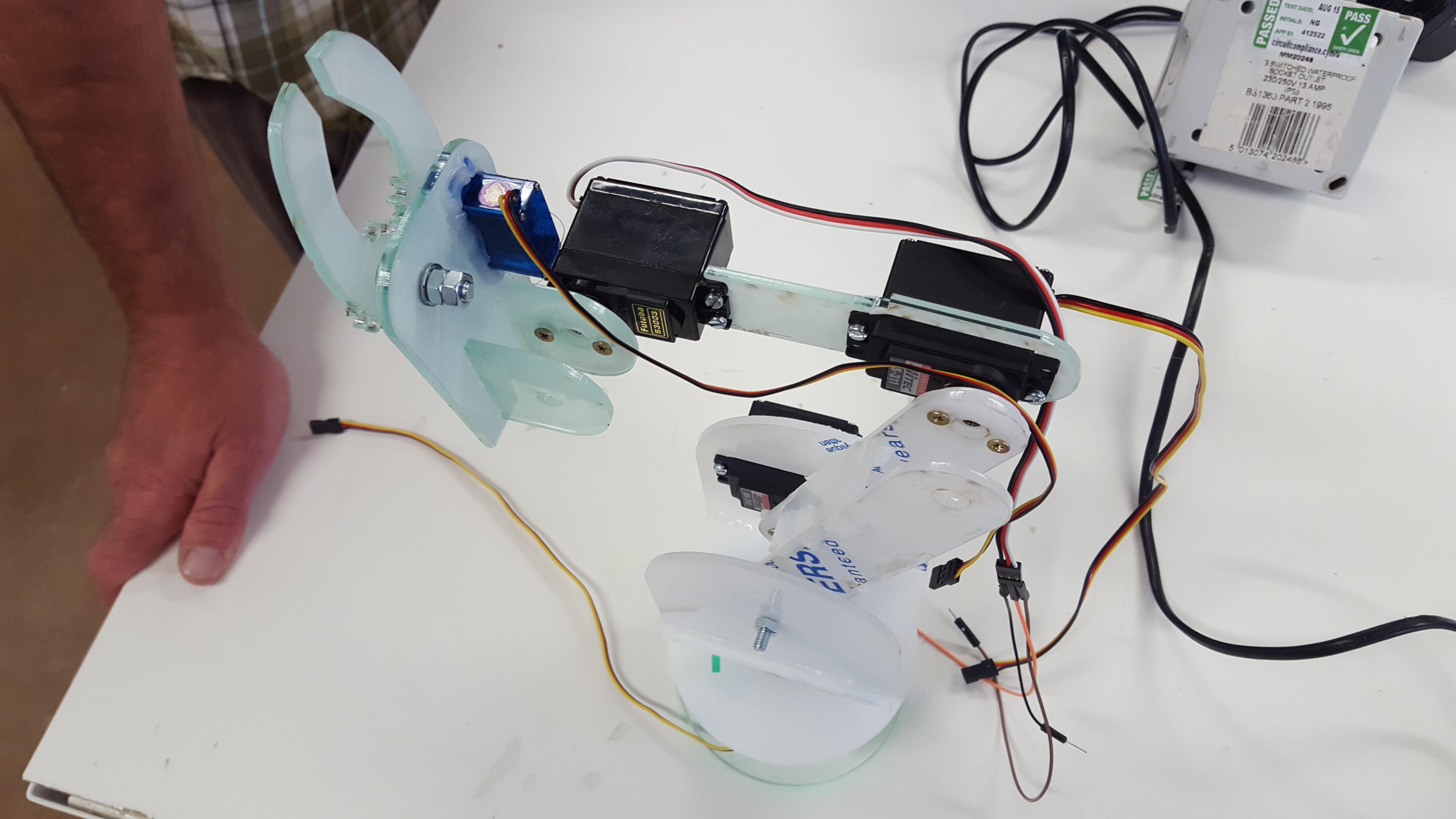
We used 3 regular digital Servo Motors for movement and a smaller Micro Servo Motor for the gripper hand.
The initial concept designs and subsequent developments were completed by Paul Waterfield and Myself and then the final design development was worked on by Kit Kaye.