
Howdy,
Over the past two days, I have been developing my exoskeleton idea. The biggest problem I have found is being able to provide enough torque to turn the joints on the arms and legs, whilst only using a small motor and power supply.
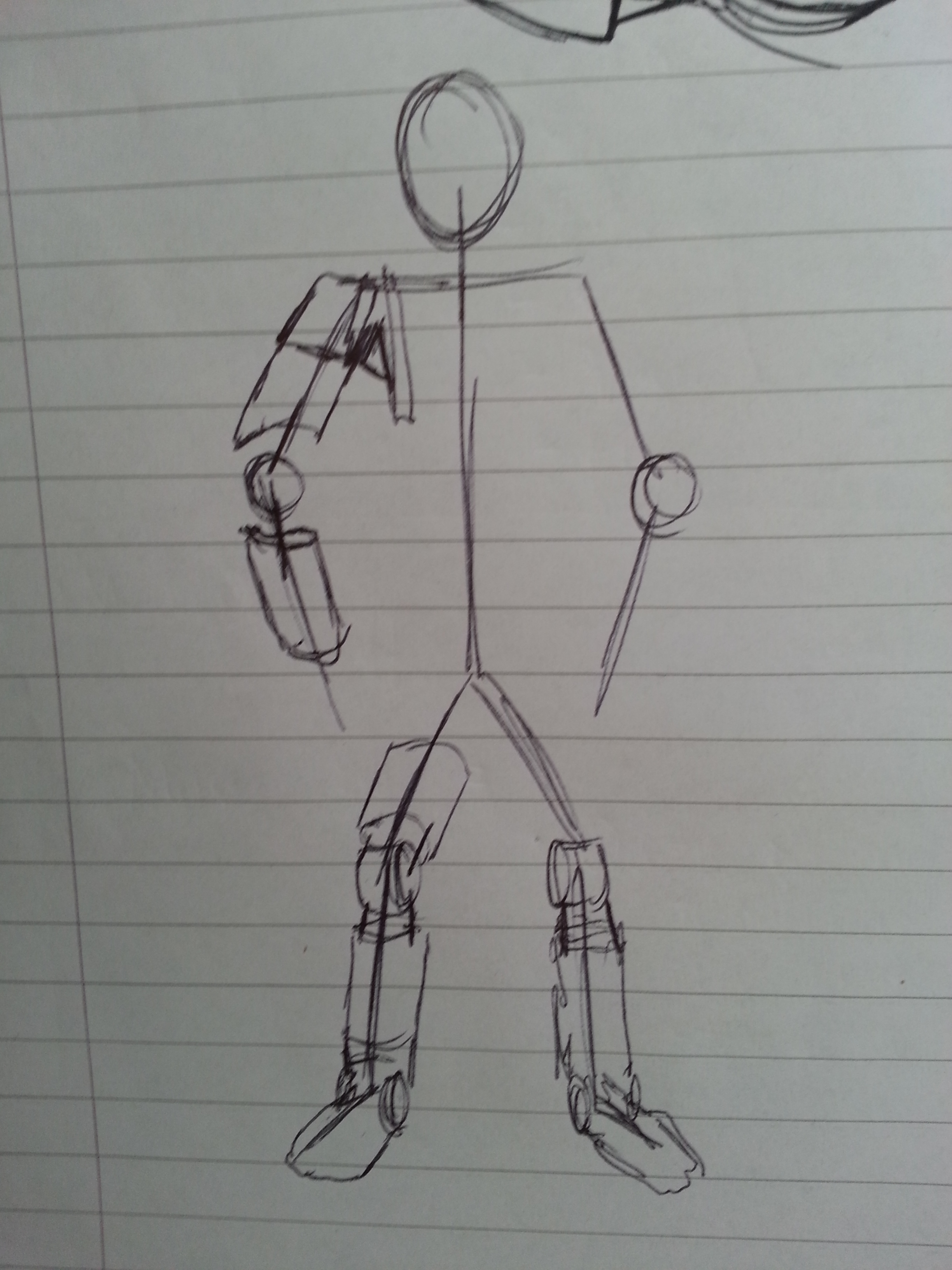
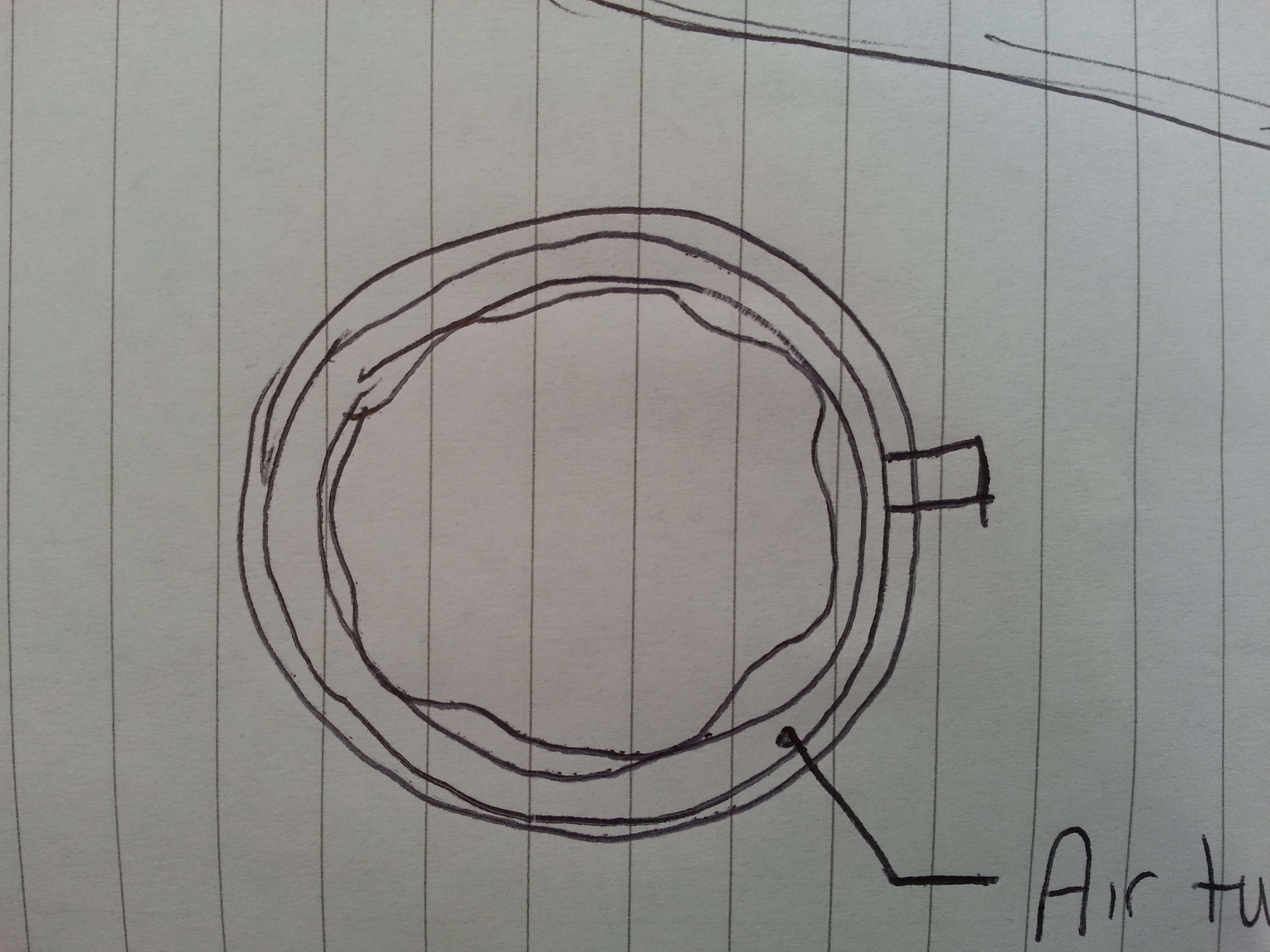
I have the outline shape that I want the design to have and a few ideas about how I could solve some of the design ideas I had when I originally thought of the idea. My main idea is to have a one size fits all armour section, with an inflatable internal pressurising section which would include a bandage and would allow the armour to fit to any arm size and to apply pressure to any wound they may have.
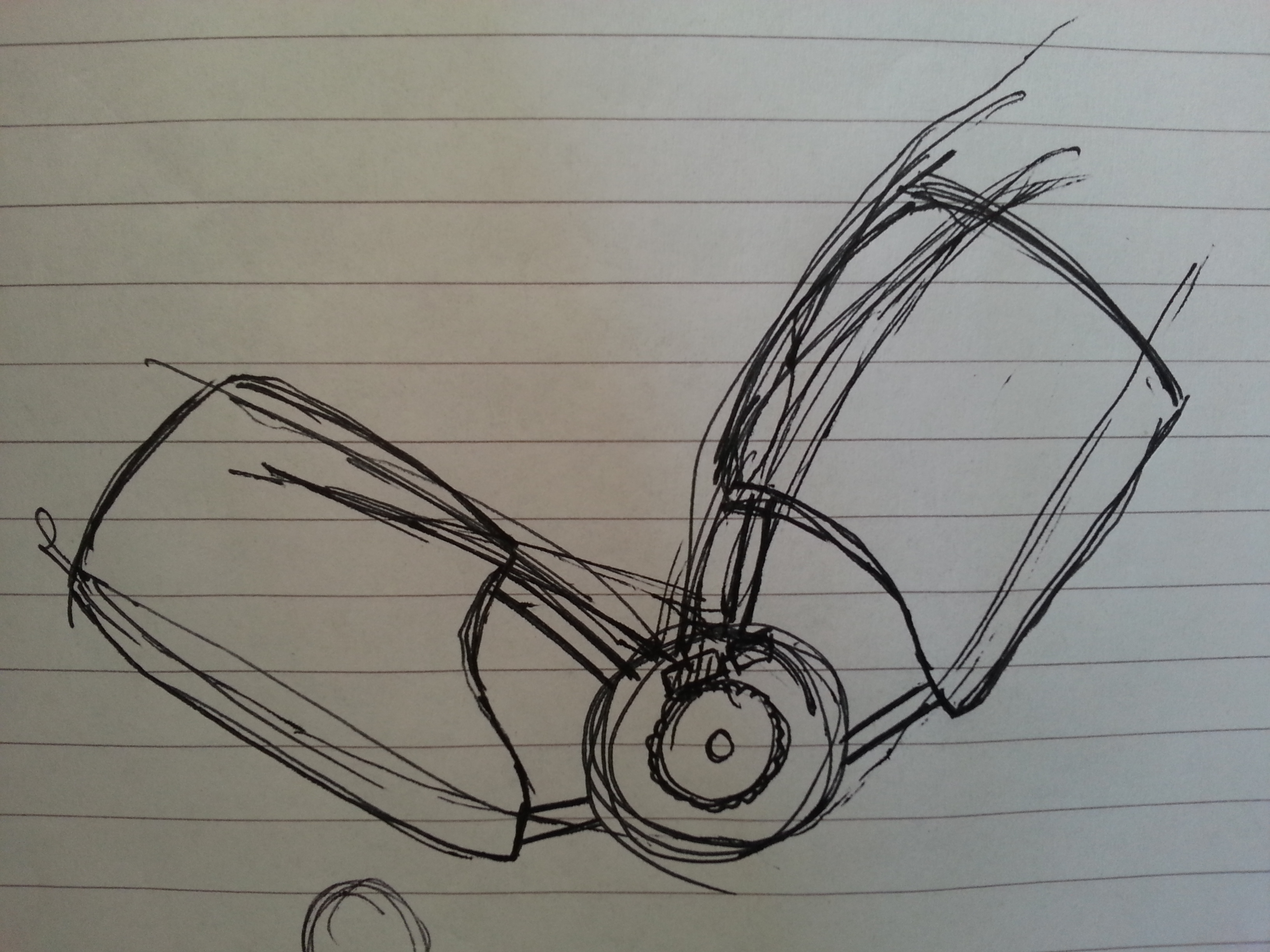
The rotation mechanism for the elbow section would be a large cog fixed to the forearm section and a worm screw and motor attached to the upper arm. This is only a preliminary idea, which would obviously need further development and the use of far more advanced technology, but for this concept, I believe it is an acceptable start.
Overall, I am quite happy with my current design and I look forward to discussing it with Theo Humphries in my tutorial next Tuesday.